|
CL-CBS
|
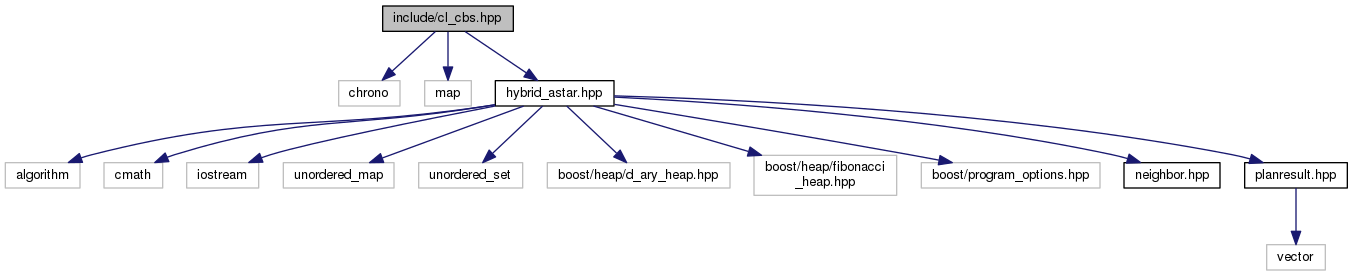
CL-CBS header. More...
Go to the source code of this file.
Classes | |
| class | libMultiRobotPlanning::CL_CBS< State, Action, Cost, Conflict, Constraints, Environment > |
| Car-Like Conflict-Based Search(CL-CBS) algorithm to solve the Multi-Agent Path Finding for Car-Like robots (CL-MAPF) problem. More... | |
Namespaces | |
| libMultiRobotPlanning | |
Macros | |
| #define | MAX_RUNTIME 120 |
CL-CBS header.
| #define MAX_RUNTIME 120 |
 1.8.11
1.8.11

